Exploration de dépendances structurelles mélodiques par réseaux de neurones récurrents
Nathan Libermann, Frédéric Bimbot et Emmanuel Vincent décembre 2020
décembre 2020DOI : https://dx.doi.org/10.56698/rfim.642
Résumés
Résumé
Dans le cadre de la génération automatique de mélodie structurée, nous explorons la question des dépendances entre les notes d’une mélodie en utilisant des outils d’apprentissage profond. Plus précisément, nous utilisons le modèle d’apprentissage séquentiel GRU, que nous déclinons dans différents scénarios d’apprentissage afin de mieux comprendre les architectures optimales dans ce contexte. Nous souhaitons par ce moyen explorer différentes hypothèses relatives à la non-invariance temporelle des dépendances entre les notes au sein d’un segment structurel (motif, phrase, section). Nous définissons trois types d’architectures récurrentes correspondant à différents schémas d’exploitation de l’historique musical dont nous étudions les capacités d’encodage et de généralisation. Ces expériences sont conduites sur la base de données Lakh MIDI Dataset et plus particulièrement sur un sous-ensemble de 8 308 segments mélodiques monophoniques composés de 16 mesures. Les résultats indiquent une distribution non-uniforme des capacités de modélisation et de prédiction des réseaux récurrents testés, suggérant l’utilité d’un modèle non-ergodique pour la génération de segments mélodiques.
Texte intégral
Introduction
1La génération automatique de mélodie est une problématique régulièrement abordée en informatique musicale, mais qui reste incomplètement résolue. Récemment revenues au premier plan, les méthodes par réseaux de neurones apparaissent potentiellement capables de modéliser des mécanismes de génération de mélodie par apprentissage à partir d’exemples.
2En 2001, Chun-Chi Chen et Risto Miikkulainen furent parmi les premiers auteurs à publier sur ce sujet. L’un des principaux problèmes qu’ils relevèrent est le manque de structure globale dans les mélodies générées. D’autres auteurs, comme Judy Franklin (2005), Douglas Eck et Jürgen Schmidhuber (2002), ont alors cherché à résoudre ce problème en utilisant des réseaux récurrents long short-term memory, ou LSTM (Hochreiter et Schmidhuber, 1997), sur un corpus de musique blues ou jazz. Ces travaux ont permis d’améliorer la qualité perçue de la musique générée mais les résultats continuent à présenter une insuffisance de structure. Nicolas Boulanger-Lewandowski, Yoshua Bengio et Pascal Vincent (2012) ont tenté de combiner le modèle LSTM avec des modèles génératifs, notamment le restricted Boltzmann machines, ou RBM (Chen et Miikkulainen, 2001). Dans leur ouvrage de 2016, Allen Huang et Raymond Wu s’intéressent à la représentation des notes dans un espace vectoriel (embedding). Natasha Jaques, Shixiang Gu, Richard Turner et Douglas Eck proposent, la même année, de restreindre un modèle LSTM préalablement appris grâce à l’apprentissage par renforcement de règles de musicologie prédéfinies. L’équipe Magenta1, quant à elle, propose un modèle d’attention inspiré du travail de Dzmitry Bahdanau, Cho Kyunghyun et Bengio Yoshua (2016). À notre connaissance, il n’existe pas aujourd’hui de modèle capable d’apprendre à générer des mélodies présentant une structure pleinement satisfaisante à l’échelle de plusieurs mesures consécutives.
3Le travail présenté dans cet article est une étude exploratoire qui s’inscrit dans le cadre de la génération automatique de mélodie structurée et qui fait appel à des outils d’apprentissage profond. Nous considérons plus particulièrement le modèle séquentiel GRU (gated recurrent units ; Cho et al., 2014), que nous étudions dans différents scénarios d’apprentissage, afin de mieux comprendre les potentialités de cette approche pour la modélisation de mélodies. Nous souhaitons notamment cerner l’importance d’une hypothèse de non-ergodicité (non-invariance dans le temps) de la structure musicale, en mettant en évidence les limites des architectures récurrentes basées sur des GRU et en étudiant les possibilités de les adapter à la génération de motifs mélodiques. On suppose en effet qu’il existe une planification dans la construction d’un segment mélodique qui ne se contente pas de se référer aux k précédents éléments pour construire le suivant. Au contraire, nous faisons l’hypothèse qu’un segment mélodique forme un tout et que, au fil de ce dernier, les divers éléments se conditionnent de façon non-adjacente pour former le schéma mélodique global.
4Ainsi, dans l’esprit des travaux récents sur les modèles tensoriels/polytopiques de segments musicaux (Guichaoua, 2017 ; Louboutin et Bimbot, 2016), nous émettons l’hypothèse que, dans le cadre de mélodies simples constituées de motifs présentant des relations d’analogie, les dépendances structurelles dans la musique ne suivent pas un procédé purement séquentiel, mais plutôt des dépendances multi-échelles. Selon cette approche, un élément musical dépend de façon privilégiée des autres éléments qui se situent dans des positions métriques homologues dans le segment, plutôt que dans le voisinage immédiat. Autrement dit, les positions métriques des notes jouent un rôle dans la construction structurelle de la musique et les architectures neuronales doivent en tenir compte.
5Nous définissons donc trois modèles récurrents basés sur des GRU : un modèle à historique glissant, qui correspond à une façon « standard » de construire et d’entrainer un modèle récurrent, un modèle à historique croissant, qui correspond à une façon « dynamique » d’apprendre un modèle récurrent et enfin un modèle à historique parallèle, avec des poids distincts selon les positions à prédire.
La comparaison des différents schémas d’apprentissage proposés selon leur capacité d’encodage de l’information musicale et de leur performance de prédiction permet d’étudier la pertinence et les limites de l’hypothèse de non-ergodicité dans les séquences mélodiques.
1. Protocole expérimental
1.1. Cellule de mémoire GRU et couche de prédiction
6Pour définir les architectures étudiées, nous utilisons comme unité de base le réseau de neurones récurrent GRU (voir Figure 1) qui fonctionne comme suit : à chaque instant t, la cellule GRU reçoit en entrée, sous forme de vecteurs, l’observation courante xt et une variable interne ht-1 qui tient lieu de mémoire des observations précédentes. À partir de ces deux entrées, la cellule GRU produit une remise à jour de h, laquelle est ensuite utilisée dans une cellule GRU semblable, qui prend ht et l’observation xt+1 en entrée et ainsi de suite.
Dans nos expériences, xt est un vecteur binaire de dimensions n = 88 correspondant à un ensemble discret de notes, chaque dimension représentant une note. Ce vecteur n’a qu’un seul symbole 1 (one-hot).
La cellule GRU se décompose en six sous-ensembles de poids de propagation d’historique (Uh, Ur, Uz, Wh, Wr, Wz) qui se combinent avec les entrées ht-1 et xt pour former ht selon les équations suivantes :
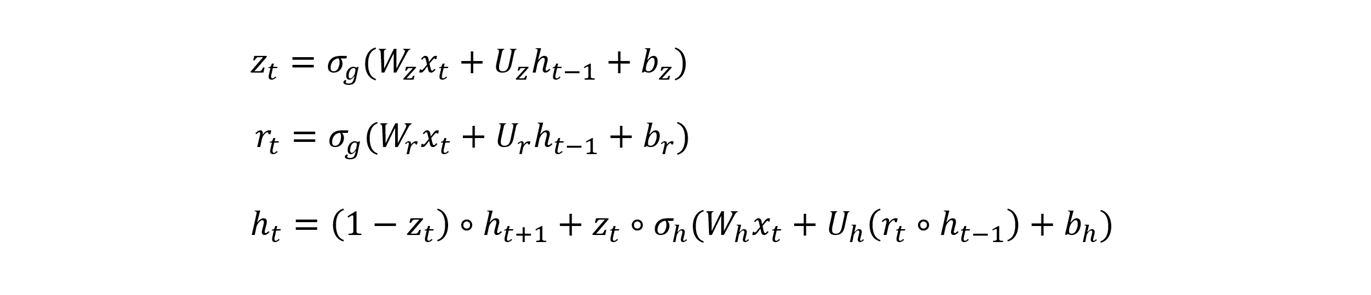
Où ∘ désigne le produit matriciel de Hadamard, σg une fonction sigmoïde et σh une tangente hyperbolique.
Figure 1. Gated recurrent units
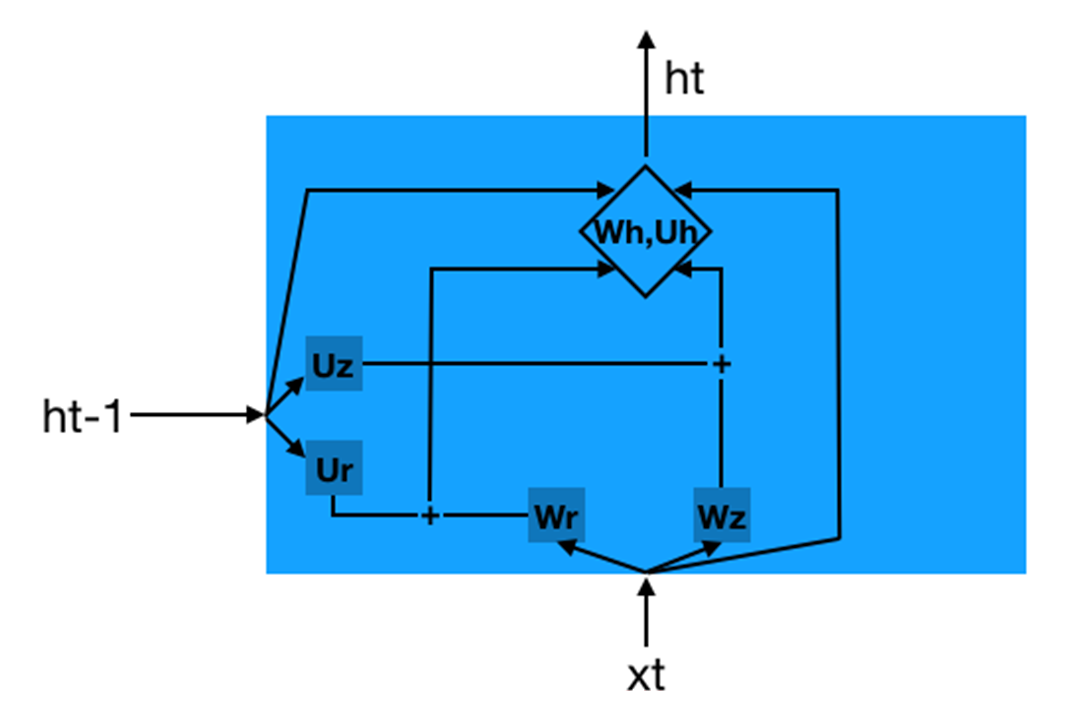
Source : Nathan Libermann, 2018
7Nous avons aussi besoin, pour définir nos architectures, d’une couche de prédiction qui, à partir d’une mémoire ht, fournit une distribution de probabilités _xt+1 de la note suivante xt+1. Pour ce faire, nous utilisons une couche entièrement connectée entre ht et _xt+1, constituée d’une matrice de poids de prédiction Wp et d’un vecteur de biais bp, ce qui fournit en sortie une distribution de probabilité a posteriori sur l’ensemble des notes :

L’apprentissage est réalisé par rétropropagation du gradient à travers le temps (Werbos, 1990).
1.2. Spécification des architectures
8Dans cette étude, nous considérons des segments mélodiques correspondant à des unités structurelles de type phrase ou section musicale. Dans cette optique, nous modélisons des séquences de N = 64 notes, obtenues en échantillonnant des mélodies qui s’étendent sur 16 mesures.
Trois architectures basées sur des GRUs sont étudiées :
-
L’architecture à historique glissant correspond à une façon standard de construire un réseau récurrent. On choisit une fenêtre d’historique de taille fixe k. Pour prédire la note _xt+1, on alimente la couche de prédiction Wp avec l’historique ht, qui, dans ce cas, est initialisé aléatoirement puis propagé depuis ht-k jusqu’à ht (voir Figure 2). La fenêtre d’historique [t - k, t] étant fixe, on ne peut calculer les prédictions _xt+1 qu’à partir de l’instant k + 1. Les poids des couches de propagation d’historique sont partagés (c’est-à-dire indépendants de t) et il en est de même des poids des couches de prédiction. Ainsi, cette architecture repose sur une hypothèse d’invariance dans le temps des éléments musicaux.
Figure 2. Architecture à historique glissant
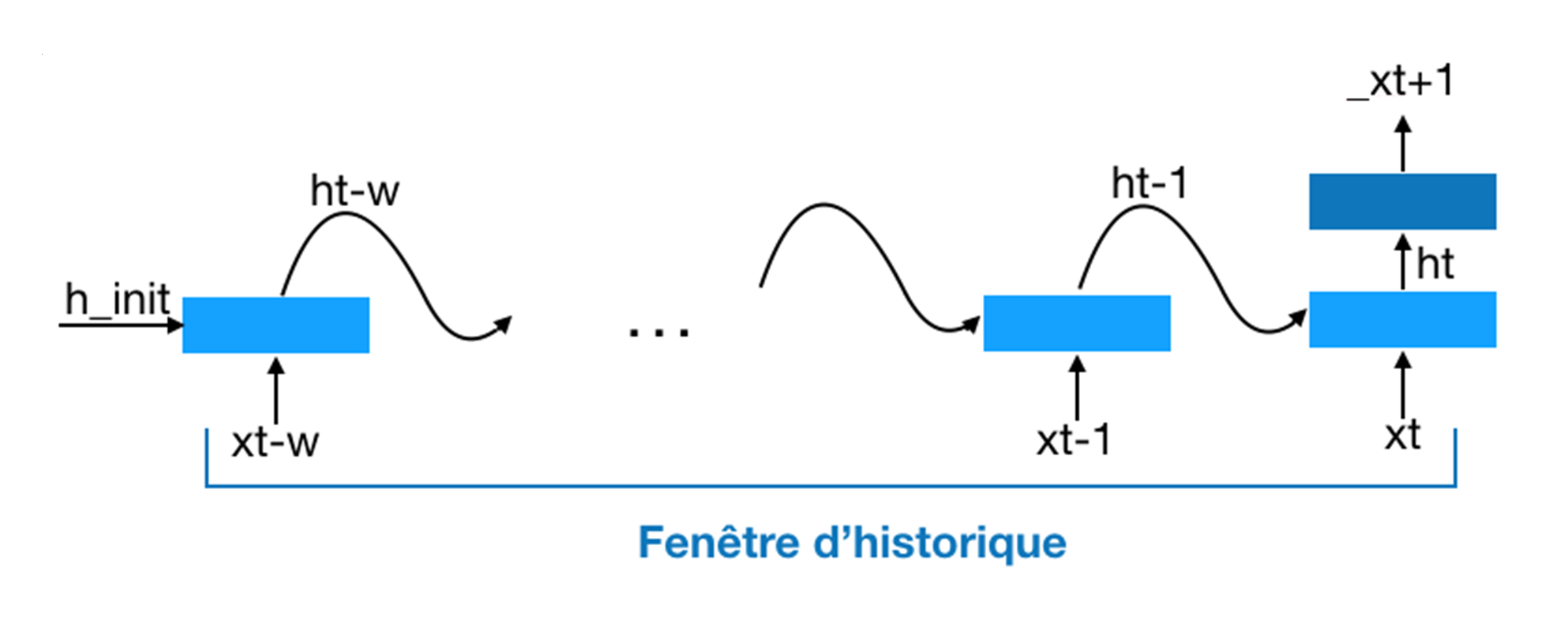
Source : Nathan Libermann, 2018
-
L’architecture à historique croissant correspond à une façon plus dynamique de construire un modèle récurrent. Ici, on procède de la même façon que pour l’architecture du modèle à historique glissant, mais on considère une fenêtre d’historique qui couvre l’intégralité de l’intervalle [1, t] et qui, par conséquent, croît au fur et à mesure que l’on progresse dans le temps (voir Figure 3). Comme dans l’architecture précédente, les poids de la couche de propagation d’historique sont communs pour les différentes positions de notes à prédire et il en est de même pour les poids de la couche de prédiction. Dans cette variante, néanmoins, il devient possible de prédire les notes dans toutes les positions temporelles, à partir d’un historique qui va croissant. On note toutefois que cette architecture repose aussi sur une hypothèse d’invariance dans le temps, du fait du partage des poids.
Figure 3. Architecture à historique croissant

Source : Nathan Libermann, 2018
-
Enfin, l’architecture à historique parallèle repose sur le même principe que l’architecture à historique croissant, à ceci près que les poids des couches de propagation et de prédiction sont indépendants pour chaque position à prédire _xt+1. On peut ainsi voir cette configuration comme N - 1 réseaux à historique croissant, indépendants les uns des autres et correspondant à chaque position à prédire _xt+1. L’indépendance de ces réseaux en fonction de la position est censée permettre à cette architecture de prendre en compte la non-invariance dans le temps et de tenir compte, si nécessaire, de dépendances complexes.
1.3. Données
9Pour ce travail d’exploration, nous utilisons les données du Lakh MIDI Dataset (Raffel, 2016), qui contient 176 581 fichiers MIDI multipistes sans appréciation de genres. Étant donné que nous nous intéressons uniquement aux pistes mélodiques monophoniques, nous en avons sélectionné environ 70 000 qui possédaient cette propriété dans le corpus originel. De ce sous-ensemble, nous avons extrait 8 308 blocs structurels de 16 mesures sous forme de fichier MIDI. Ne disposant pas de segmentation automatique assez fiable, nous sélectionnons uniquement les 16 premières mesures de mélodies monophoniques de type 4/4.
10Afin de permettre au modèle de pouvoir mieux extraire les relations relatives entre les notes, nous avons représenté ces mélodies en référence à la première note de la séquence (arbitrairement fixée à do), de sorte à être indépendant de la tonalité initiale. Nous obtenons donc 8 308 séquences mélodiques de 16 mesures.
11Pour simplifier la représentation traitée, on considère dans un premier temps une discrétisation de l’information mélodique dans ces segments. Nous avons procédé à un découpage des mesures en quatre portions égales et relevé à chaque fois la note active sur ces positions. Si un silence apparaît sur l’un des temps considérés, nous prolongeons la valeur de la note précédente, ce qui évite d’avoir à gérer des absences de notes.
12Le résultat de ce processus de réduction conduit à des séquences « mélodiques » de 16 mesures correspondant toutes à des successions de 64 notes. Chaque note est représentée par un vecteur de dimension 88 (correspondant aux 88 notes d’un clavier de piano). Lorsqu’une note est active, la dimension associée à cette note dans le vecteur est mise à 1 et toutes les autres à 0.
1.4. Protocole
Le corpus composé de 8 308 séquences est divisé en deux groupes A et B comprenant chacun 4 154 séquences. Nous définissons quatre scénarios pour chaque architecture (voir Table 1) :
-
Apprentissage sur le groupe A, test sur le groupe A
-
Apprentissage sur le groupe A, test sur le groupe B
-
Apprentissage sur le groupe B, test sur le groupe A
-
Apprentissage sur le groupe B, test sur le groupe B
Table 1. Protocoles d’apprentissage et de test pour mesurer les capacités de compression et de généralisation des architectures
|
Train |
Test |
Test |
|
A |
A |
B |
|
B |
B |
A |
Source : Nathan Libermann, 2018
Lors du test, nous relevons pour chaque position de note l’erreur moyenne sur l’ensemble des exemples de test, ceci dans le cadre des trois architectures décrites dans la section 1.2.
13Les mesures effectuées en utilisant le même ensemble de test que celui utilisé pour l’apprentissage permettent de caractériser les capacités de compression de l’information mélodique par les différentes architectures, en fonction de la position de la note dans le segment musical. Celles qui croisent les ensembles d’apprentissage et de test rendent compte de la capacité de généralisation des architectures à des données nouvelles.
1.5. Critère d’évaluation
14Pour chaque instant t, nous calculons l’erreur entre le vecteur de sortie _xt et la note réelle xt par la fonction d’erreur quadratique moyenne (mean squared error, ou MSE). On rappelle que _x est un vecteur de dimension n = 88 correspondant à une distribution de probabilités et x un vecteur one-hot de même dimension, correspondant à la note effectivement active.

15C’est l’évolution de cette erreur que nous examinons pour chaque position de note et dans chaque scénario, afin d’observer la façon dont les différentes architectures encodent les dépendances structurelles. Nous analysons à la fois les motifs engendrés par la variation de l’erreur moyenne entre les différentes positions et le critère de compression/prédiction.
1.6. Détails complémentaires de mise en œuvre
16Pour ces expériences, nous utilisons la bibliothèque d’apprentissage profond Pytorch2. L’historique est un vecteur de dimension 100. Chaque exemple est présenté 40 fois au cours de l’apprentissage (40 epochs). L’optimiseur utilisé est Adagrad.
2. Résultats
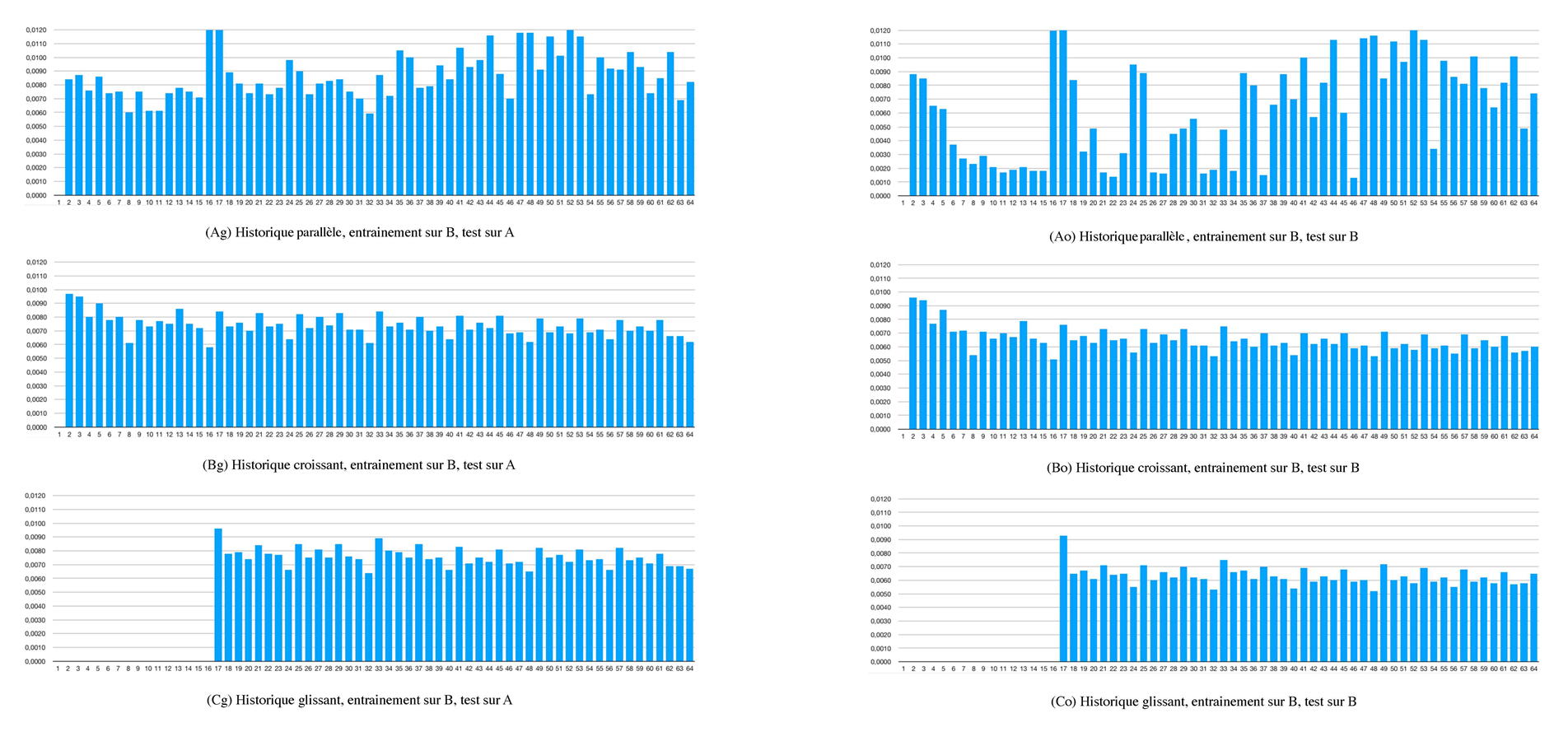
17Les figures 4 et 5 illustrent les résultats du protocole expérimental décrit dans la section précédente. La figure 4 correspond aux différentes architectures apprises à partir du corpus A et la figure 5 aux architectures apprises sur le corpus B.
Figure 4. Erreur de prédiction moyenne pour chaque position pour le corpus A

Source : Nathan Libermann, 2018
Figure 5. Erreur de prédiction moyenne pour chaque position pour le corpus B
Source : Nathan Libermann, 2018
Pour chacune de ces figures, les résultats de généralisation des architectures sont représentés sur les graphiques Ag, Bg, Cg et les résultats de compression sur les graphiques Ao, Bo et Co :
-
graphique A : architecture à historique parallèle ;
-
graphique B : architecture à historique croissant ;
-
graphique C : architecture à historique glissant.
18En premier lieu, on constate une similarité de comportement entre courbes homologues sur la figure 4 et la figure 5. Cela permet de penser que les tendances observées sont relativement peu influencées par les spécificités des deux demi-corpus.
19On remarque ensuite que pour les architectures à historique glissant et croissant, les valeurs des capacités de généralisation (Bg et Cg) présentent un niveau d’erreur à peine plus élevé que les valeurs des capacités de compression (Bo et Co). À l’inverse, les capacités de compression et de généralisation de l’architecture parallèle se comportent très différemment l’une de l’autre. En effet, l’architecture parallèle possède beaucoup plus de paramètres libres, ce qui crée une capacité bien plus forte du réseau à comprimer les données d’apprentissage, mais entraîne un phénomène d’over-fitting (surapprentissage) qui altère la capacité de généralisation sur de nouvelle données. Ce phénomène est bien moins saillant sur les deux autres architectures.
Un examen plus précis des motifs observés sur les courbes d’erreur apporte également des observations intéressantes.
20Les courbes pour les historiques glissant et croissant présentent une pseudo-périodicité marquée à l’échelle de huit notes et des oscillations secondaires aux échelles 4 et 2, suggérant fortement une « synchronisation » des capacités de modélisation des architectures correspondantes sur des cycles de deux mesures.
21Les courbes Ao (que ce soit pour la figure 4 ou la figure 5) présentent pour leur part un comportement plus contrasté : on remarque tout d’abord une décroissance très nette sur le premier quart du segment, puis des variations plus erratiques sur la partie centrale (2e et 3e quart) et enfin une remontée globale de l’erreur sur le dernier quart. On peut opérer un rapprochement entre ces observations expérimentales et différentes considérations musicologiques sur la structure des segments musicaux, notamment que l’on constate souvent la réalisation de formules musicales conventionnelles en fin de segment. Ces dernières sont donc finalement moins prédictibles en fonction du contexte, puisqu’elles sont plus ou moins prédéterminées d’avance indépendamment de celui-ci.
22Par ailleurs, selon le modèle cognitif d’Implication-Réalisation d’Eugene Narmour (1990) et son extension récente par Frédéric Bimbot, Emmanuel Deruty, Gabriel Sargent et Emmanuel Vincent (2016), les fins de segments structurels constituent fréquemment des dénis d’implication par rapport aux progression musicales établies dans les portions antérieures, ce qui peut également constituer une hypothèse expliquant le comportement observé sur les courbes Ao. Toutefois, ce comportement étant moins net sur les courbes Ag, des expériences complémentaires sont requises pour mieux asseoir ces hypothèses.
Conclusions
23Dans ce travail d’exploration, nous avons considéré trois architectures de réseaux de neurones récurrents et nous avons analysé leur comportement en termes d’erreur de modélisation de schémas mélodiques simplifiés.
Ces expériences nous ont permis d’observer que la prise en compte de la non-invariance dans le temps de la structure musicale dans une architecture de réseau de neurones récurrents permet de rendre compte de façon plus fine de la structure globale des mélodies apprises par le réseau.
Dans le cadre de nos expériences actuelles, cette conclusion demeure partielle, du fait d’un volume de données d’apprentissage limité, qui entraîne une capacité insuffisante de généralisation du réseau appris.
Toutefois, cette première exploration de l’hypothèse de non-invariance dans le temps de la structure musicale, par des réseaux de neurones récurrents, nous conforte dans l’idée de poursuivre nos recherches dans cette voie.
Plusieurs pistes sont prévues pour compléter ces travaux à court terme, permettant ainsi d’enrichir ces premières investigations par des expériences supplémentaires et les résultats correspondants.
Remerciements
24Cette étude a reçu le support de l’Agence nationale de la recherche, dans le cadre du projet Dynamiques créatives de l’interaction improvisée (DYCI2, ANR-14-CE24-0002-01), et de la région Bretagne.
Bibliographie
Bahdanau Dzmitry, Cho Kyunghyun et Bengio Yoshua (2016), « Neural machine translation by jointly learning to align and translate », arXiv preprint. URL : https://arxiv.org/abs/1409.0473
Bimbot Frédéric et al. (2016), « System & contrast: a polymorphous model of the inner organization of structural segments within music pieces », Music Perception, vol. 33, no 5, p. 631-661.
Boulanger-Lewandowski Nicolas, Bengio Yoshua et Vincent Pascal (2012), « Modeling temporal dependencies in high-dimensional sequences: application to polyphonic music generation and transcription », arXiv preprint. URL : https://arxiv.org/abs/1206.6392
Chen Chun-Chi J., Miikkulainen Risto (2001), « Creating melodies with evolving recurrent neural networks », in Proceedings of the 2001 International Joint Conference on Neural Networks, Washington, 15-19 juillet, Piscataway, Institute of Electrical and Electronics Engineers, vol. 3, p. 2241-2246. DOI : https://doi.org/10.1109/IJCNN.2001.938515
Cho Kyunghyun et al. (2014), « Learning phrase representations using RNN encoder-decoder for statistical machine translation », in Conference on Empirical Methods in Natural Language Processing, Doha, 25-29 octobre, Stroudsburg, Association for Computational Linguistics, p. 1724-1734.
Eck Douglas et Schmidhuber Jürgen (2002), « Finding temporal structure in music: blues improvisation with LSTM recurrent networks », in Hervé Bourlard et al. (dir.), Proceedings of the 12th IEEE Workshop on Neural Networks for Signal Processing, Martigny, 4-6 septembre, New York, The Institute of Electrical and Electronic Engineers, p. 747-756. DOI : https://doi.org/10.1109/NNSP.2002.1030094
Franklin Judy (2005), « Jazz melody generation from recurrent network learning of several human melodies », in Ingrid Russell et Zdravko Markov (dir.), Proceedings of the Eighteenth International Florida Artificial Intelligence Research Society Conference, Clearwater, Floride, 15-17 mai, Menlo Park, AAAI Press, p. 57-62.
Guichaoua Corentin (2017), « Modèles de compression et critères de complexité pour la description et l’inférence de structure musicale », thèse de doctorat en informatique, sous la direction de Frédéric Bimbot, Université de Rennes 1.
Hochreiter Sepp et Schmidhuber Jürgen (1997), « Long short-term memory », Neural Computation, vol. 9, no 8, p. 1735-1780.
Huang Allen et Wu Raymond (2016), « Deep learning for music », arXiv preprint. URL : https://arxiv.org/abs/1606.04930
Jaques Natasha et al. (2016), « Generating music by fine-tuning recurrent neural networks with reinforcement learning », in Deep Reinforcement Learning Workshop, Neural Information Processing Systems, Barcelone, 9 décembre.
Louboutin Corentin et Bimbot Frédéric (2016), « Description of chord progressions by minimal transport graphs using the system & contrast model », in Proceedings of the 2016 International Computer Music Conference, École des Beaux-Arts d’Utrecht, 12-16 septembre, p. 345-350.
Narmour Eugene (1990), The analysis and cognition of basic melodic structures: the implication-realization model, Chicago, University of Chicago Press.
Raffel Colin (2016), « Learning-based methods for comparing sequences, with applications to audio-to-MIDI alignment and matching », thèse de doctorat en électrotechnique, sous la direction de Daniel Ellis, Université Columbia.
Smolensky Paul (1986), « Information processing in dynamical systems: foundations of harmony theory », in David Rumelhart et James McClelland (dir.), Parallel distributed processing: explorations in the microstructure of cognition, vol. 1 Foundations, Cambridge, MIT Press, p. 194-281.
Werbos Paul (1990), « Backpropagation through time: what it does and how to do it », Proceedings of the IEEE, vol. 78, no 10. DOI : https://doi.org/10.1109/5.58337
Notes
1 https://magenta.tensorflow.org/2016/07/15/lookback-rnn-attention-rnn [consulté le 30/11/2020]
2 http://www.pytorch.org [consulté le 30/11/2020]
Citation
Auteur
Quelques mots à propos de : Nathan Libermann
Quelques mots à propos de : Frédéric Bimbot
Quelques mots à propos de : Emmanuel Vincent

Index
ISSN: 2778-4479
Numéros
- n° 9 - Inharmonique (1977) de Jean-Claude Risset : création, ré-création et avenir
- n° 7-8 - Culture du code
- n° 6 - Techniques et méthodes innovantes pour l'enseignement de la musique et du traitement de signal
- n° 5 - Informatique et musique : Recherche et Création 1
- n° 4 - Techniques et pratiques du studio audio
- n° 3 - Pratiques électroacoustiques et dispositifs numériques
- n° 2 - Préservation des œuvres utilisant les technologies numériques
- n° 1 - Revue Francophone d'Informatique Musicale
Présentation
- À propos de la RFIM
- Comité scientifique
- Comité de lecture
- Politiques de publication et cession de droits
- Charte éditoriale
Appels à contributions
Appels clos
- Cultures du code en informatique musicale : langages de programmation, méthodologie de la création logicielle et musicale, manières de faire
- Journées d'informatique musicale 2012-2013
- Préservation des œuvres utilisant les technologies numériques
- Musiques mixtes et logiciels libres
- Recherche-création en informatique et création musicale
Informations
Partenaires
![]()

Syndication
| Plan du site | Portail des revues de la MSH Paris Nord
Edité par Lodel | Accès réservé | ISSN 2261-8589
Revue hébergée et soutenue par la Maison des Sciences de l'Homme Paris Nord

La revue "RFIM" est mise à disposition selon les termes de la Licence Creative Commons Attribution
Pas d'utilisation commerciale, pas de modification, 3.0 France.