- accueil >
- Numéros de la revue >
- À l’écoute des lieux : le field recording comme pr... >
- Articles soumis à la suite d’un appel à articles >
A Prototype System for Sound Recording in Motion
Theofanis Maragkos, Andreas Mniestris et Theodoros LotisDOI : https://dx.doi.org/10.56698/filigrane.1156
Résumés
Résumé
Cet article propose une méthode d'enregistrement des paysages sonores à l'aide d'un système d'enregistrement mobile. L'objectif de cette méthode est de reproduire les paysages sonores de manière fidèle et transparente, c’est-à-dire sans aucune trace sonore du processus d'enregistrement. Il s’agit d’enregistrer un signal audio qui conserve les détails les plus fins des évolutions spatiales et temporelles du paysage sonore, à partir duquel il serait possible de simuler préciément l'expérience réelle d'une promenade sonore.
Dans ce but, un appareil d'enregistrement en mouvement a été conçu, appelé Moving Sound-Receptor [MSR]. Il peut être utilisé pour réaliser des enregistrements en mouvement, qui suivent des trajectoires horizontales (pouvant permettre d’accéder à des zones inaccessibles, par exemple, à la surface d'un lac) ou verticales. Cette méthode a été expérimentée lors d’une variété de sessions d'enregistrement en extérieur dont les plus caractéristiques sont présentées dans cet article. En outre, le MSR est présenté du point de vue de sa conception et de son design, montrant comment ceux-ci se reflètent dans le choix de ses composants et leur assemblage.
Abstract
In this paper a method to record soundscapes using a mobile recording system is proposed. The purpose of this method is the verisimilar reproduction of soundscapes as spatiotemporal continua without any sonic traces of the recording process, i.e. transparently. Thus, the recorded audio signal retains the finest details of the soundscape’s evolution due to both spatial and temporal variability, which would be impossible to capture with other methods. This method is proposed as an approach to audio reproduction that could simulate an actual experience of a soundwalk.
For this purpose an apparatus for recording in motion was designed, named Moving Sound-Receptor [MSR]. It can be used to record along either accessible or inaccessible horizontal tracks (eg. over the surface of a lake) as well as along vertical trajectories. This method has been applied to a variety of outdoor recording sessions, the most characteristic of which are presented in this paper. In addition, the MSR is introduced from the point of view of its conception and its design and how these reflect in the choice of its components and their assembly.
Texte intégral
1. Introduction
1For approximately a century and a half, the culture-changing technology of capturing fleeting sounds into some sort of material format has known a continuous technological evolution. During this long course, the quest for verisimilitude between original and reproduced sonic forms has been an important guiding force for understanding and resolving the large number of physical factors that impede accuracy in the process of sound recording and reproduction.
2At all stages of this technological development, fidelity standards emerge by expressing the similarity between original and reproduced sound in terms of technological criteria, i.e. measurable quantities, and by describing the “imagined psychological sense of realism”1, i.e. the subjective evaluation of the qualities of the reproduced sound as identical to the original. In fact, the term fidelity originates from the music recording industry of the early 20th century. It reached a hiatus in the second half of the 20th century when High Fidelity introduced advanced – and expensive – sonic reproduction apparatus used by audiophiles2. After the '70s the necessity of comparing the final audio product to any recorded “trueness” of a sonic event receded considerably3 as a result of advanced studio production methods, which rendered simultaneous recording of acoustic sources unnecessary, as well as the gradually increasing applications of electronic sound generation technology. Today, audio recording and reproduction technology have reached high levels of sophistication. They convey accurately fine details of acoustic signals regarding acoustic energy spectral distribution, dynamic range of intensity, binaural spatial cues, etc. This allows for high levels of verisimilitude including reproduction of three-dimensional acoustic environments. “As our recording and playback systems become more sophisticated, the immersive listening experience is guided by reproduction systems that can better approximate the natural listening environment. Thus, allowing the listener to rely less on their a priori knowledge to make sense of what they hear, and move toward a more natural listening experience. This creates a more compelling and easier to listen to virtual auditory environment” 4.
3However, this development is based on capturing sound as a temporal-only variation, i.e. whilst the sound recording system remains firmly positioned within the acoustic field. Field recording, particularly of soundscapes, is an increasingly developing practice during the last few decades. Its popularity dictates new approaches to fidelity including the need to capture the acoustic fields as they change in space simultaneously with their temporal evolution. This brings forward new demands regarding “truthful” reproduction, that is to be able to capture the variation of sonic environment within a place due to continuous change of position of the observer/recordist. Methodologies to address this issue have been proposed based on capturing sound at a number of well-defined stationary points within the recording area. The sound field, then, between these positions, is “synthesised” at a post-production phase using the recordings from the stationary points and crossfading algorithms5. An artificial approach like this can provide a useful approximation to reproducing a soundscape's spatiotemporal variability, which can be particularly effective in environmental studies6 as well as in Virtual/Augmented Reality applications. This research is the result of an intention to enhance the accuracy of this kind of audio reproduction by actually capturing the sound from every point of a path within a sonorous space while moving along this path instead of “synthesising” it. In this paper are presented some of the results of a method we propose for capturing spatiotemporal variations by means of a moving sound recording apparatus excluding the recordist from the whole recording process as well as any noises produced by this apparatus itself aiming at the best possible transparency.
2. Field Recording and Soundscape Research
4Field recording is a practice that dates back to 1890s7 but the term itself appears four decades later8. Today, field recording is a well-established practice by various specialists, including biologists, environmentalists, ethnographers, sound artists, sound designers, etc. Mitchell Akiyama remarks that despite the increasing theoretical interest in this practice, manifested in a number of publications, the term itself is reluctantly used and lacks a well-established definition9. For example, Erika Brady examines in depth how the phonograph has changed the way ethnographers shifted their methodologies from written to sonic documentation as a result of recordings able to reproduce sonic events captured directly from the field of research, but she avoids mentioning or, even more, defining what field recording is10. Similarly, according to Akiyama, field recording tends to be avoided as a term in Jonathan Sterne’s “The Audible Past: Cultural Origins of Sound Reproduction” 11. Lane and Caryle do not provide a definition of field recording although they present this practice thoroughly by interviewing prominent sound artists who specialise in it12. .Paul Virostek, who examines recording techniques for creating ambient and sound effects mainly for the film industry, mentions that field recording “sometimes called phonography, is the craft of recording sound effects outside in the wider world”13 and that it “is an opportunity to champion snapshots taken from a drifting world of sound”14. Finally, Tom Western mentions that studio recordings are “artificial construction[s] of sonic manipulation, while field recordings are heard as the transparent capturing of external reality”15. While we cannot trace a clear definition of what field recording is exactly, we would like to adopt for the aims of this project this last formulation, even though it is very important to keep in mind that transparency of the recording apparatus is an ideal and it can be only approximated16.
5Environmental sound research spread steadily after the 70’s, particularly after the seminal initiatives of R. M. Schafer who adopted the term soundscape and made it known through his work17. Ever since, field recording has become a fundamental practice for the study of the audible dimension of the environment, enriching Environmental Studies significantly. This increases proportionally the significance of field recording as a method for recording sonic environments accurately. For this accuracy, however, it has to be considered that the sound fields change simultaneously in time and in space. As mentioned before, stationary microphone positionings can reproduce effectively only temporal sonic variations around that particular position, and therefore a coverage of the soundscape of an extended area must include some kind of its spatial variability. In addition, moving through a sounding area, the audible percept ties spatiotemporal variability into a unified entity, which, when we want to recreate it, we should be able to capture correctly, i.e. as it varies in time-and-space. This raises the fidelity standards of a field recording and calls for proper solutions.
6Although recent technologies provide bigger storage capacities, better data compression and longer battery performance, long and very long environmental recordings can still present difficulties. Sampling methodologies, based on a series of periodical recordings and spatially distributed arrays of microphones, are proposed in order to meet the demands of accurate reproduction of a soundscape temporally and spatially respectively. Maher18 and de Sousa et al.19 made recordings using a single stationary microphone at different time intervals. Since they did not include spatiality, their work falls outside our scope. Kasten et al.20 and Bello et al.21 use a number of stationary sound receptors to realize their recordings. The former study considers that “acoustic signals constitute a source of information that can be used to measure the spatial and temporal distributions of vocal organisms in ecosystems”22. According to their methodology, a well-defined nexus covering the entire area of the place is used to calculate the position of the sound receptors, each one producing samples of 60 seconds every half hour. The latter study aims to measure urban noise pollution and uses an array of 17 microphones. For this study they “chose an area with a relatively dense deployment of 17 nodes. [They] established a 100m boundary around each node and merged to form the focus area”23. Both these studies use receptors of limited audio quality since they are not focusing on the study of the soundscape itself but on some of its other particular features. In these two studies spatiotemporal variability of the sound field is a part of their methodology, but sound quality is not a primary objective.
7More research on this subject by ecologists and behavioural biologists makes use of spatially arranged systems of many microphones in order to develop methods to calculate the species distribution, to estimate the abundance of the species and to evaluate biodiversity and “health” of a place24. As Farina mentions, these arrays of microphones have been proven to be the most efficient way to investigate the relationship between landscape patterns and the sonic environment25. These methods are based on sampling sound from fixed positions within a place and producing the whole sound field using the samples from every two neighbouring positions and interpolating between them at a post-production phase. All these methods are a good approximation for resolving the problem of capturing the spatiotemporal variability of a soundscape, which is very important to the study of soundscapes26.
8Matsinos et al.27, Mazaris et al.28 and Papadimitriou et al.29 present the idea of acquiring the spatial variation of a soundscape by means of a well-defined nexus of recording positions using one microphone only. Here, the aim is sampling sound allowing for temporal and spatial reconstruction of the variability of the soundscape of the entire area of about 2 square kilometers during both circadian and annual cycles. The methodology proposed in this study focuses on defining the optimal distance between recording positions and sampling periodicities. This collection of samples should ensure a good approximation of continuous accurate reproduction of the spatial and temporal variation of the soundscape along the whole research area during any one day of the year. For this, fifteen recording positions were designated, distanced 250 meters from each other. A team of four members were set at each one of these positions successively obtaining a variety of synchronous data – including an audio recording – for a period of ten minutes. Each position was visited every three hours, eight times during one day. This process was repeated four times in one year, around solstices and equinoxes. Using the 480 audio samples that were gathered, it became possible to approximate reproductions of that soundscape, “synthesizing” its continuous spatiotemporal variation by applying interpolation techniques between these samples. Thus, by mapping the audio samples according to their spatial position and temporal order, and crossfading between the temporally and spatially neighboring samples, approximations of what is heard at each point at any time through the year are possible. Furthermore, this collection of audio samples has been used as the basis for the design and realisation of a sound installation system that permits virtual soundwalks over digital simulations of this area30.
9Soundwalks proposed by Schafer31 and developed by his students, particularly by Hildegard Westerkamp32, have become a widely spread activity33. The subjective experience of walking though sounding environments is certainly a non-repeatable event. However, being able to reproduce the sonic dimension of this dynamically evolving flow within a spatiotemporally varying sound field, could be useful not only for documentation reasons but also for pedagogical, artistic and other applications. Sochaczewska et al. mention that moving with the microphone inside the sonic environment is the second of two distinct approaches to environmental recording, the first being to record with one or several spot microphones at the sound scene34. This is a rare reference to such a recording method. There are actually many factors that affect the process of recording in motion while simultaneously carrying the sound capturing apparatus35. The most important of them is that various sounds, that may be considered unwanted, intrude the recording and deteriorate its fidelity, if transparency is set as fundamental criterion of it. A large number of unwanted sounds, most often the sound of footsteps, can interfere because of the proximity of the microphone(s) to the moving recordist's body. In certain cases, this kind of sound may not be taken as unwanted at all36 – and indeed walking sounds may be very interesting and of great variety depending on the kind of footwear, the type and condition of the ground37, etc. However, setting transparency as a major sound quality factor, footstep sounds, apart from indicating the observer, may disturb the listener’s attention and be perceived as an incident in the Schaefferian sense38. Apart from walking, there are also other sounds produced involuntarily during the movement of the recordist may include rustling clothes, breathing, etc.39, as well as sounds from a dangling microphone or boom handling40.
10For a previous attempt of ours to record audio while walking on a path41, two independent recording systems were used to record sound, both strapped on the recordist: a) a compact multi-microphone array for surround sound capture42 to record the soundscape that was attached on a mic stand 0.5 meters above the head of the recordist and b) a coincident stereo pair43 that was attached to another mic stand 0.5 meters above the feet of the recordist aiming at them to record the sound of the footsteps. This method was designed with the intention of using the audio from the stereo pair for noise reduction processing, in post-production. This experiment made it very clear that it is impossible to avoid recording unwanted sounds or eliminating them artificially without deteriorating significantly the quality of the recording. Apart that, an alteration of the soundscape itself due to the presence of the observer was clearly noticed44 (for example some animals stopped producing sound when the recordist was approaching them).
11As a result of this experience, and aiming for maximum transparency, a new recording apparatus was developed, based on the principle of decoupling the recording system from the observer. This was the beginning of the development of the Moving Sound-Receptor.
3. The Moving Sound-Receptor (MSR): Conception and Features
12The Moving Sound-Receptor is a system that can record in motion along horizontal or vertical linear trajectories. The paths corresponding to these trajectories may or may not be accessible by a walking observer. In fact, the system can be used to record over an inaccessible piece of land across two boundary points as well as, modified appropriately, on the surface of a lake. Most importantly, this system can record moving vertically.
13The MSR is conceived as a system that: a) operates in open air, b) is mobile, c) captures sound (and possibly video) while moving, d) ensures maximal transparency, e) is sensitive in order to operate effectively in very silent sonic environments, f) is cost effective g) leaves the least possible environmental footprint, h) produces sound recordings that must contain the audio information necessary to recreate an impression as close as possible to what an observer traveling along this path would perceive as the sound environment (allowing immersive reproduction, with various pedagogical, artistic and recreational Virtual/Augmented Reality applications, etc.) and i) produces recordings that must also be mono compatible (for scientific research purposes). In relation to these directive concepts the MSR was built as an apparatus that is: 1) light (relatively), 2) durable and robust, 3) easily transportable, 4) manually driven, 5) completely silent while in motion and 6) not intrusive into the soundscape.
14The structure of the MSR is organised in three functionally distinct parts: a) the receptor, b) the pulley system, and c) the mobility system.
3.1 The MSR Assembly
3.1.1 The Receptor
15This is the main component of the MSR containing the microphone and the sound recorder (see Image 1) mounted firmly and securely on a shockproof metal frame. To respond to the prerequisites the metal frame was built using highly durable materials of the kind used for electromechanical prototypes, resistant to high mechanical tension, of the highest quality within a moderate to low budget and – most importantly – mechanically decoupled from the microphone. A passive system was designed to absorb vibrations of the mount bracket (see C in Image 1) and on the microphone cables (see D in Image 1).
16The Passive Absorption System was evolved gradually by a trial-and-error empirical process and included:
17a) The construction of a shockproof frame consisting of a system of double suspension ring mount (see Image 2 and O in image 1) designed to sway independently. This prevents the system from vibrating in maximal amplitudes caused by resonance on a single eigenfrequency while moving. This frame carries the mount-bracket (C) that holds the microphone via a mic-suspension-mount (see B in Image 1).
18b) The use of absorbent materials at the connection and contact points of each component with its neighbour. A foam type absorber was used at every mechanical junction, to minimise the transmission of mechanical vibrations through the structural elements of the frame (see M and F in Image 1).
19c) The attachment of a metallic weight of 1.75 kg, joint at the lower part of a long rod connected to the frame, which acts as counterweight to the receptor mount; its role is to lower the center of gravity of the whole assembly, consequently providing stability and equilibrium to the system during movement (see H and I in Image 1).
20d) The use of custom made ‘low-profile’45 XLR connectors with special decouplers46 that reduce mechanical noise interferences which are passing to the microphones as the cables vibrate when the MSR is in motion. In addition, a heat-shrink tube is used to hold together the four microphone cables in order to prevent uncontrollable cable movements that could potentially add noise (see E and D in Image 1).
Image 1: The components of the receptor.
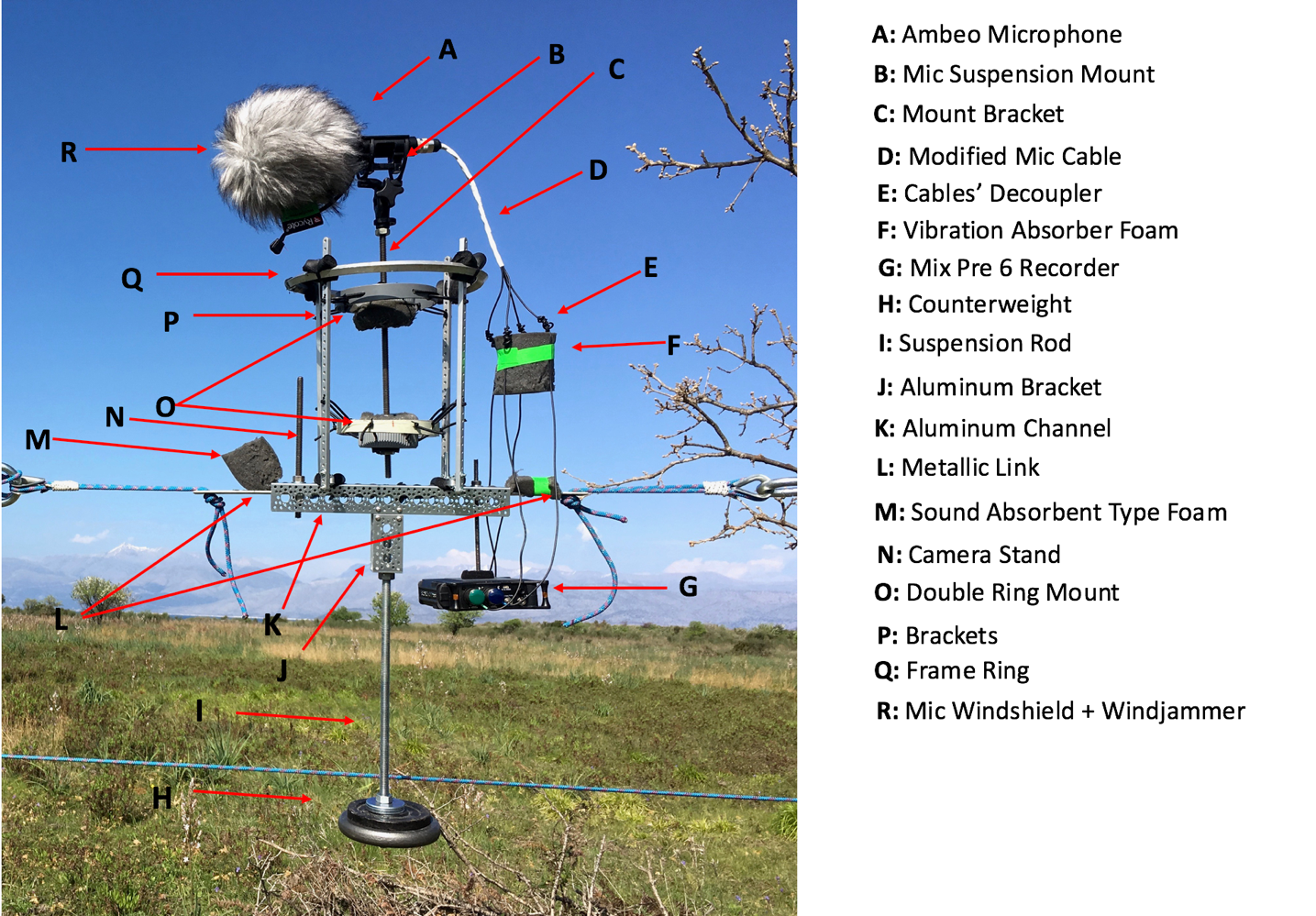
Image 2: The double ring mount of the receptor.

3.1.2 The Pulley System
21This is the system that grips the MSR to its two supports, placed at each one of the two boundary points of the recording path. The motion control mechanism, which is a part of the pulley system, is attached to one of these supports where the recordist is also positioned during the recording process. The pulley system is designed to sustain very strong tensions in order to minimise transversal vibrations during the receptor's longitudinal motion. The motion control mechanism contains a rotating wheel connected to the pulleys which is set in rotary motion by hand with the use of a crank. This system is a mechanical assembly whose parts' analogies are designed for optimal manual drive, in order to easily maintain the receptor as close as possible to a uniform motion.
3.1.3 The Ropes
22This is the part of the MSR which sustains the receptor. It consists of two pieces of rope extended parallell to each other along the recording path. They are connected to the pulleys at each end of this path. Their most important property must be a minimal dynamic elongation, to maintain their length under dynamically varying tension. Also, they must sustain relatively high tensions (approximately 650 Kg). These properties ensure minimal vibrations of all sorts during motion as well as a great degree of controlling accuracy.
3.2 Sound Capturing Devices and Ambisonics
23According to its conception, the MSR recordings should be compatible with both monophonic and polyphonic formats. In Guastavino et al.47 “a subjective evaluation of various multichannel reproduction methods (including 5.1 and transaural), and Ambisonics was judged as the most enveloping and true to nature for the recreation of outdoor environment”. The fact that ambisonics is not a channel-based recording/reproduction method and that is compatible with reproduction systems of any number of channels48, makes it a versatile solution for the reproduction to a wide variety of listening situations, from monophonic to immersive (audio) environments. For these reasons, the ambisonic recording method was chosen and was realised by means of a compact four-capsule microphone. To record the four channels from the microphone, a multichannel recorder was used (see G in Image 1).
24The microphone used was a Sennheiser Ambeo, with the appropriate windshield and windjammer (see A and R in Image 1). This microphone has four matched KE 14 cardioid capsules in tetrahedral arrangement. The raw feed, A-format, from the microphone was recorded by a Sound Devices: Mix Pre 6 audio recorder, firmly attached on the assembly of the receptor (see G in Image 1). The resolution of the audio was at 24 bit and 96 kHz sampling rate. The audio from the microphone in A-format was eventually converted to Classic FuMa [W, X, Y, Z] B-format, using a software plugin provided by the microphone manufacturer (Ambeo A-B converter Plugin). Working with the Reaper Digital Audio Workstation, Ambisonics Correction Filter plugin was used to correct the Ambeo’s frequency response by applying a preset filter from the manufacturer. Two filters were applied to each channel of the recordings: a) a High Pass Filter (HPF), at 40 Hz with a slope of 48 dB/oct. and b) a High Shelving Filter (Hi-Shelf) at 12 kHz approximately 10 dB attenuation. The HPF filter was used in order to cut-off the extreme low frequencies, since those particular sonic environments did not provide any audio information in this spectral region. The Hi-Shelf was used to attenuate the microphones’ preamplifier self-noise49. After the EQ, the JS ATK FOA Decode Binaural plug-in50 was applied with Head Related Transfer Function (HRTF) set to “spherical 5”, to achieve better spatial representation of the recorded soundscapes when reproduced from headphones.
25A particular concern throughout all the recording sessions has been to set the gain levels in order to reassure loudness uniformity at all times. For this, the input gain levels on the recorder were set as high as to allow the least audible sound from a distance of 250 meters to be captured. The estimation of this least audible sound was made by subjective evaluation in the field51.
4. The Recordings
4.1 Criteria for selecting the Recording Area
26The first tests of the MSR took place at Antinioti Lagoon (Λιμνοθάλασσα Αντινιώτη), North Corfu, Greece, an area that was studied during a soundscape research project between 2005 and 200652 (see Image 3). The same area was selected for our project, partly for the same reasons this place was chosen for that research project53, and also because:
27a) there was direct access to a rigorously organised archive, created during that research, which included a complete set of audio recordings, sound level measurements and subjective evaluations plus a number of papers describing, among others, their methodological approaches54,
28b) this area was easily accessible,
29c) the terrain allowed for a variety of recording experiments and particularly for some useful operational variations over its inaccessible regions (eg. a lake),
30d) the possibility of using the MSR in both methodological approaches, i.e. the static (similar to the methodology of the above-mentioned study of 2006) and recording-in-motion. This would give the opportunity not only to compare the recordings of these two methods but also, potentially, to initiate a larger project to compare the new recordings and sound level measurements with corresponding data from that study.
Image 3: The study area (Antinioti lagoon) where the first tests of the MSR took place.

Image 4: The Horizontal MSR suspension extending to 80 meters.

31We present two recordings made in the evening of March 19, 2019.
4.2 Recording on a Horizontal route
32Two series of recordings were made. For both, the MSR is extended above a linear path between two trees (points A and B correspondingly, in Image 3) at a distance of about eighty meters from each other (see also Image 4). For the second recording, a loudspeaker was placed about in the middle of this path, that would play-back animal sounds artificially altering the soundscape.
4.2.1 Recording A155
33During the first recording (A1) the receptor moves steadily from Ta to Tb covering the distance in eight minutes and twenty-three seconds. The sound level in this place during the recording was quite low56. The system records transparently except from some faint noise of the pulleys, which can be heard near the beginning and the end of the movement57. The effect of moving on the path is becoming clear in the playback only when the microphones are getting near sounding objects58, which are getting incrementally louder. Motion within the soundfield is mostly imperceptible elsewhere due to the fact that all sound sources (mostly animals) are far away from the recording path. Therefore, they do not provide the cues necessary to create spatial variation and therefore an impression of motion.
34In this recording, the MSR is moving between two trees in a meadow. A rocky seashore is located at about 300 meters on the right. A beach is located 450 meters at the right-back side and another one is about 450 meters straight in front after a cluster of trees. In the field there are a few sheep inside a fenced pasture, which can be heard from the left side with their characteristic bleats and bell sounds. From the far right, a subtle sound from the calm sea can be discerned, coming a bit louder from the right-back side where the beach is. Several flies, bees, mosquitoes and all kinds of insects fly around the microphone. Dogs are heard barking from the far left. There are many insects, while some flies, between minutes 2:20-3:20 and 5:20-6:00, do not hesitate to sit on the receptor and the microphone travelling along. At minute 3:30 a gust of wind is captured. Some birds can be heard from far away. From minute 6:25 until the end of the recording, the characteristic low-frequency noise of an airplane is heard subtly from the front-left side. At minute 6:33 and 6:53 a crow is heard, while at 7:50 the crows become two, one from the right and the other from the left side. Approaching the end of the route, the rustle of the tall pine trees from the high-front side can be heard. The intensity of the sound coming from the sea increases as the MSR is getting nearer to the rocky shore.
4.2.2 Recording A259
35This is the result of an experiment that was organised as complement to, and after, the main recordings, in order to test the effectiveness of the MSR. This was necessary because of the poor results of the previous recordings which, as discussed above, had not provided satisfactory results regarding the sonic impression of moving through the field. For this experiment, a wireless loudspeaker was positioned in the middle of the recording path and ten meters to the left, looking at the tree towards the beginning of the receptor's itinerary. Sounds of cicadas, recorded the previous summer, were played back through the loudspeaker. This sound, artificially introduced in the sound field, allowed for a distinctive, directional sonic presence in the sonic field. During this recording the MSR is returning, back from Tb to Ta, covering this distance in nine minutes and thirty eight seconds. As the microphone approaches and moves away from the loudspeaker the intensity and spectral variations of the sound coming from it provide adequate cues for the reproduction of the corresponding spatio-temporal variability of the soundscape. Unlike the previous recordings, this one succeeds in demonstrating that the MSR can provide a convincing simulation of what is heard in this sound field while moving along the linear path from Tb to Ta.
36Some unexpected effects created by the intrusion of the artificially reproduced sounds to the soundscape make Recording A2 even more interesting. Introducing cicadas' characteristic summer “keynote” sound in mid-March, a change was clearly observed in a flock of crows nearby. These birds, lazy until the loudspeaker started playing, reacted with an energetic and loud vocal response. They were flying over the source of the sound, the loudspeaker, vocalising intensely and attacking it; maybe because that particular (summer) sound was appearing quite oddly (in spring)60.
4.3 Recording along a vertical route
37To record along a vertical trajectory is a very useful application of the MSR since it can provide a sonic experience that is impossible to have otherwise. The site selected to test this was Rematia (Ρεματιά) in Halandri (Χαλάνδρι), a suburb of Athens, Greece61 where a creek runs through a small park in the middle of an urban area (Image 5a). These are the basic selection criteria for this place:
38a) the rich soundscape due to diverse avifauna,
39b) the tall trees on the banks of the creek – including the thirty meters tall Aspen (Populus) chosen for this recording session,
40c) the noticeable difference of the sound field at the top and at the bottom of the recording site62.
41The recording took place on June 5, 2020 in the area of the creek, which contained small quantities of water at the time of the recording session. The starting position of the microphone was set at four meters away and five meters above the creek. A residential area with mildly busy streets spreads out about a hundred meters away from the recording site. For the vertical movement of the MSR the pulley and rope system was stretched from the ground to a branch of a tree at a height of twenty meters (Image 5b). The whole suspension system had to be modified accordingly in order to effectively and securely carry the receptor (Image 5c).
42Listening to the recordings, the spatiotemporal variability of the soundscape in relation to MSR’s vertical motion becomes clear even for this range, of twenty meters. The result of the vertical movement of the receptor produces during playback a continuum of slowly and imperceptibly changing soundscape. A sort of crossfading between the successive sound layers corresponding to the various heights along the movement is perceived. Nevertheless, the differences due to the changing altitude within the sound field can be heard quite clearly. Additionally, there is an observable connection between the speed of the vertical motion of the receptor and the rate of change of the character of the soundscape. Near the ground, biophony dominates the soundscape yielding to anthropophony at higher positions because of the impact of the urban sounds (mainly traffic).
43Two recordings of this session are presented here.
4.3.1 Recording B163: linear upwards motion of the MSR
44The B1 audio sample contains the sound recorded by the receptor during its vertical motion from the ground up to twenty meters, parallel to the trunk of a poplar. The main axis faces the creek, leaving the city behind. In the beginning, the sound from the creek is very distinct and soon, as the receptor ascends, we hear a common blackbird, sparrows, frogs, insects and crows. After the first minute, the sound of the city comes in progressively while near the end it dominates the soundscape. A few seconds near the end, as the receptor gets very close to the foliage of the poplar, rustling can be heard.
45Video recording Bv164: linear upwards motion of the MSR
46This is a video sample, conjugate of the B1 audio sample. It has been captured simultaneously with the audio by an action camera mounted on the receptor and pointing to the main-axis of the microphone.
4.3.2 Recording B265: Linear downwards motion of the MSR
47This recording is the second phase of the same recording session. The receptor descends to the ground. The soundscape now follows an opposite development, i.e. the urban noise is gradually diminishing as the receptor moves towards the ground. The transition is imperceptible, as in recording B1. At twenty meters high, near the branches, the rustling of the leaves predominates over other sound sources. We hear a motorbike passing from the right side driving away, people walking and other man-made sounds. The birds’ vocalisations continue uninterrupted and unaffected by these sounds. At the same time, enters the sound from the slow-flowing stream. The sound of a helicopter invades the soundscape while cars are heard, crossing the road behind. Gradually, the end of the route is reached returning to the first, the lower, of these two boundary sonic environments. The contrast between the noisy and louder soundscape city at the beginning, in comparison to the calm and more quiet soundscape on the bank and the slopes of the creek at the end, is worth noting.
48Video Recording Bv266: Linear downwards motion of the MSR
49This is a video sample, conjugate of the B2 audio sample. It has been captured simultaneously with the audio by an action camera mounted on the receptor and pointing to the main-axis of the microphone.
4.4 A Few Comments Concerning the Speed of the Receptor
50In our recording sessions the speed of the receptor was maintained as steadily as possible, between 0.14 to 0.17 m/s, depending on the session. The speed of a walking person is, on average, 1.4 m/sec or 5 km/h67. The latter value is adopted to simulate walking speed in some field recording studies68. On a path relatively difficult from the one we studied in Antinioti (North Corfu), a normal walking speed can drop significantly. We kept the speed of the receptor between ten and seven times slower than normal walking, simulating the “contemplative” pacing of a hypothetical observer. In addition, the technical specifications of the MSR's construction would not allow for faster movements. It became apparent that in faster movements, the receptor the whole system was entering a state of unpredictable and uncontrollable vibrations that were creating audible interferences. This problem will be addressed in future modifications of the MSR. Finally, although it was driven manually, therefore not with perfect accuracy, the MSR responded to the manual control fairly well, after some practice, and performed effectively within the frame of the pacing rates we had planned for its operation.
Image 5: a) the area where the MSR was suspended in the Rematia river (below left), b) the receptor at the initial, lower position during recording procedure (above left), c) the aspen tree, the MSR at 20 meters and the ropes (right).

5. Conclusion
51The MSR is proposed as a solution for transparent mobile recording of soundscapes. It is still in its early stages of development. Two characteristic applications of this system were presented: 1) recording in motion along a linear path in a rural area and 2) recording in motion along a vertical linear trajectory in a small park within an urban area. In conclusion:
52a) It is possible to record in motion quite effectively using the MSR. However, at this stage of its development, the maximum effective recording length is limited and the mechanical system created for this purpose is rather complicated to set up and operate.
53b) The audio recordings are of high quality and they allow compatibility with many audio reproduction formats.
54c) The audio recordings can be used to recreate verisimilar three-dimensional sonic impressions of moving through the original soundscape.
55d) These verisimilar three-dimensional sonic impressions of moving through the original soundscape become particularly interesting when the sonic field is recorded in motion along the vertical axis, thus offering an experience that would be impossible to achieve with other means. The fact that there were satisfactory results even at low heights, makes it quite promising that longer vertical movements would give a lot more interesting results.
56e) The MSR can be used for environmental research and education as well as in all sorts of augmented and virtual reality applications to reproduce soundscapes as experienced by a person in motion. It can also be more useful to record soundscapes of places that are not accessible to walkers. This method of recording is potentially useful in bioacoustic research for it provides maximal resolution of spatial variations of a sound field while extending sonic spatiotemporal mapping by including the vertical dimension.
57The MSR is an ongoing project. Currently, this work is focusing on resolving the problems created by operational limitations some of which were mentioned in this text. A series of recording sessions using the MSR’s vertical motion is pending.69 A series of subjective evaluation tests is prepared in order to assess the effectiveness of the MSR, which will start at the end of 2021.
Notes
1 Barry Truax, Acoustic communication, Greenwood Publishing Group, 2001, p. 8; More in Jonathan Sterne, The Audible Past: Cultural Origins of Sound Reproduction, Duke University Press, 2003, p. 215-286.
2 David Morton, Off the Record: The Technology and Culture of Sound Recording in America, Rutgers University Press, 1999, p. 13-47.
3 ibid., p. 13-47.
4 Agnieszka Roginska and Paul Geluso (Ed.), Immersive Sound: The Art and Science of Binaural and Multi-Channel Audio, Taylor & Francis, 2017, p. 3, italics in the original.
5 Constantinos Stratoudakis & Kimon Papadimitriou, “A dynamic interface for the audio-visual reconstruction of soundscape, based on the mapping of its properties”, in Proceedings of the 4th International Sound and Music Computing Conference SMC07, Lefkada, Greece, Jul. 2007, p. 11-13.
6 Almo Farina, Soundscape ecology: principles, patterns, methods and applications, Springer Science & Business Media, 2013, p. 236-239; Yiannis G Matsinos, et al., “Spatio-temporal variability in human and natural sounds in a rural landscape.”, in Landscape ecology 23.8, 2008, p. 945-959.
7 Jonathan Sterne, op. cit., p. 27; Erika Brady, A spiral way: How the phonograph changed ethnography, Univ. Press of Mississippi, 1999, p. 1-2.
8 Mitchell Akiyama, The phonographic memory: a history of sound recording in the field, Doctoral dissertation, McGill University, 2015, p. 17.
9 ibid., p. 20.
10 Erika Brady, op. cit., p. 7-8.
11 Mitchell Akiyama, op. cit., p. 21.
12 Cathy Lane and Angus Carlyle, (eds.), In the Field: The Art of Field Recording, Axminster: Uniformbooks, 2013, p. 9.
13 Paul Virostek, Field Recording: From Research to Wrap: An Introduction to Gathering Sound Effects, Airborne Publications, 2012, p. 30.
14 Ibid., p. 9.
15 Tom Western, “Field Recording and the Production of Place”, in Critical approaches to the production of music and sound, Samantha Bennett & Eliot Bates, (eds.), Bloomsbury Publishing USA, 2018, p. 23-40.
16 Barry Truax, op. cit., p. 9.
17 R. Murray Schafer, The Soundscape: Our Sonic Environment and the Tuning of the World, Vermont: Destiny Books, 1977/1994.
18 Robert C. Maher, “Acoustics of National Parks and Historic Sites: the 8,760 hour MP3 File”, in Proc. 127th Audio Engineering Society Convention, New York, NY, October, 2009.
19 Ivandson Praeiro de Sousa, et al., “Scale-free and Characteristic Time in Urban Soundscape”, in Physica A: Statistical Mechanics and its Applications 530, 2019.
20 Eric P. Kasten, et al., “The Remote Environmental Assessment Laboratory's Acoustic Library: An Archive For Studying Soundscape Ecology”, in Ecological Informatics 12, 2012, p. 50-67.
21 Juan P. Bello, et al., “Sonyc: A System for Monitoring, Analyzing, and Mitigating Urban Noise Pollution”, in Communications of the ACM 62(2), 2019, p. 68-77.
22 Eric P. Kasten, et al., op. cit., p. 50.
23 Juan P. Bello, et al., op. cit., p. 74.
24 Daniel T. Blumstein, et al., “Acoustic Monitoring in Terrestrial Environments Using Microphone Arrays: Applications, Technological Considerations and Prospectus”, in Journal of Applied Ecology 48, 2011, p. 758–767.
25 Almo Farina, op. cit., p. 238.
26 Ibid., p. 236-239; Yiannis G. Matsinos, et al., op. cit., p. 945-959.
27 Yiannis G. Matsinos, et al., op. cit., p. 945-959.
28 Antonios D. Mazaris, et al. “Spatiotemporal Analysis of an Acoustic Environment: Interactions Between Landscape Features and Sounds”, in Landscape Ecology 24.6, 2009, p. 817-831.
29 Kimon D. Papadimitriou, et al., “Cartographic Representation of the Sonic Environment”, in The Cartographic Journal 46.2, 2009, p. 126-135.
30 Constantinos Stratoudakis & Kimon Papadimitriou, op. cit., p. 11-13.
31 R. Murray Schafer, op. cit., p. 212-213.
32 Hildegard Westerkamp, “Soundwalking”, in Sound Heritage, Vol. III No. 4, 1974. Reprinted and updated in Angus Carlyle (ed.), in Autumn Leaves: Sound and the Environment in Artistic Practice, Paris, 2007, p. 49-54. online: https://cutt.ly/qE30av4 ; Hildegard Westerkamp, “Soundwalking as Ecological Practice”, in The West Meets the East in Acoustic Ecology Proceedings for the International Conference on Acoustic Ecology, Hirosaki University, Hirosaki, Japan, November 2-4, 2006.
33 Antonella Radicchi, “A Pocket Guide to Soundwalking. Some Introductory Notes on its Origin, Established Methods and Four Experimental Variations”, in Atmosphäre & Wahrnehmung, 2017, p. 70–73. online: https://cutt.ly/zE6cCHh
34 Katarzyna Sochaczewska, et al., “Soundscape Recording: Review of Approaches”, in Audio Engineering Society Convention 142, 2017, p. 1.
35 Ibid., p. 2.
36 Francesco Aletta, et al., “Differences in Soundscape Appreciation of Walking Sounds from Different Footpath Materials in Urban Parks”, in Sustainable Cities and Society 27, 2016, p. 367-376.
37 Ibid.
38 ‘[…] the incident is a parasitic disturbance “due to some technical fault, which adds itself on and is neither desired nor heard as a property of the sound”’. Michel Chion, in Guide des objets sonores, BUCHET CHASTEL, 1994, p. 141, English translation by John Dack and Christine North.
39 Cathy Lane and Angus Carlyle, op. cit., p. 34, 128, 143, 155.
40 Paul Virostek, op. cit., p. 323.
41 Theofanis Maragkos, Kostas Kiosis, Basilis Mouzakitis. “Technical Requirements for Video and Audio Recording Trails Paths”, in 4th Panhellenic Conference of Acoustic Ecology, ‘Sound, Noise, Environment’, Mytilene, 2016, p. 288–299, (in Greek).
42 The Holophone H2-Pro was used to record directly to 5.1.
43 We used the stereo microphone Rode NT4 with the appropriate windshield and windjammer.
44 ‘The individual listener within a soundscape is not engaged in a passive type of energy reception, but rather is part of a dynamic system of information exchange’. Barry Truax, op. cit., p. 10.
45 Low-Profile or LoPro connectors are microphone connectors for balanced connections designed to considerably reduce the weight at the connection point (see for ex. https://www.cabletechniques.com/lopro-cables, accessed 29.08.2021).
46 Called Cable Savers, these are flexible pieces of durable rubber used to minimise friction noises, patented by Bubblebee Industries, (https://www.bubblebeeindustries.com/products/the-cable-saver, accessed 29.08.2021).
47 Catherine Guastavino, et al., “Ecological Validity of Soundscape Reproduction”, in Acta Acustica united with Acustica 91(2), 2005, p. 333-341.
48 Michael A. Gerzon, “Ambisonics in Multichannel Broadcasting and Video”, in Journal of the Audio Engineering Society 33(11), 1985, p. 859–871.
49 The intensity of the sound to be recorded from that sonic environment was very low so the preamps were set to a very high gain (see also footnote 51).
50 https://www.ambisonictoolkit.net/documentation/reaper/, accessed 29.08.2021.
51 A loudspeaker placed 250m away from the recording position was playing back sounds at various volumes until the recordist marked the barely audible; then the input gain was set as high as to be able to capture this sound.
52 For more details: Yiannis G. Matsinos, et al., op. cit., p. 945-959; Antonios D. Mazaris, et al. op. cit., p. 817-831; Kimon D. Papadimitriou, et al., op. cit., p. 126-135.
53 Yiannis G. Matsinos, et al., op. cit., p. 947.
54 ibid., p. 948-949.
55 This recording can be heard and/or downloaded at https://cutt.ly/DvABytk. It is an mp3 (at 320 kbps) audio file in binaural format (headphones are recommended).
56 Sound level measurements showed average LAeq = 27.5 dBspl.
57 For the first recording (A1 from 00:00 to 00:15) and for the second recording (A2) from 07:15 to 09:22.
58 In this case, some trees at the end of the trajectory at Tb.
59 This recording can be heard and/or downloaded at: https://cutt.ly/vbuZ98Q. It is an mp3 (at 320 kbps) audio file, in binaural format (headphones are recommended).
60 The whole event can be heard at 0:00-0:40, 2:10-2:25,3:05-3:10, 4:22-4:35, 4:57, 6:39,7:49 of Recording A2.
61 The exact coordinates: 38°1'35"N 23°48'29"E
62 There is an altitudinal difference of more than twenty meters between the level of the small park with the creek at the bottom and the level of the urban area around at the top.
63 This recording can be heard and/or downloaded here: https://cutt.ly/wbw544H. It is an mp3 (at 320 kbps) audio file, in binaural format (headphones are recommended).
64 It can be viewed and/or downloaded here: https://cutt.ly/vbw6b4h (headphones are recommended).
65 This recording can be heard and/or downloaded here: https://cutt.ly/CbeerKt. It is an mp3 (at 320 kbps) audio file, in binaural format (headphones are recommended).
66 It can be viewed and/or downloaded here: https://cutt.ly/xbewDS5 (headphones are recommended).
67 Raymond C. Browning, et al., “Effects of Obesity and Sex on the Energetic Cost and Preferred Speed of Walking”, in Journal of Applied Physiology 100(2), 2006, p. 390–398.
68 Francesco Aletta, et al., op. cit., p. 367-376.
69 A series of recording sessions in urban areas have been planned which had to be postponed because of the covid19 pandemic restrictions.
Citation
Auteur
Quelques mots à propos de : Theofanis Maragkos
Theofanis Maragkos est membre associé du Department of Sound Technology and Musical Instruments de la Ionian University de Corfou, en Grèce. Il propose des modules d’enseignement sur le son en direct, les techniques d'enregistrement, la postproduction et le mastering. Parallèlement, il travaille sur sa thèse de doctorat portant sur l'étude et l'enregistrement du paysage sonore à l’aide de techniques de prise de son en multicanal, sous la direction d'Andreas Mniestris au Department of Music Studies de la Ionian University. Il a participé en tant que chercheur associé au programme de recherche « Opticoacoustic Ecology »(7/2011-12/2013), impliquant l'enregistrement de certains aspects d'écosystèmes sélectionnés dans les îles Ioniennes, visant la préservation de la richesse naturelle régionale et la promotion du développement durable local. Il a fait partie de l'équipe de conception et de réalisation d'ARTE270° - Artificial Restoration of Transmuted Environments (2013-2014). Il a réalisé un grand nombre d'enregistrements de paysages sonores dans toute la Grèce. Il travaille également en tant qu'ingénieur du son pour l'enregistrement et le live. Actuellement, il est chercheur dans le cadre du programme Erasmus+ : « The Soundscape We Live In ». fanismaragkos@yahoo.gr.
Quelques mots à propos de : Andreas Mniestris
Andreas Mniestris est professeur de composition de musique électronique au département de musique de la Ionian University. l'Université Ionienne de Corfou. Il est directeur du Electroacoustic Music Research and Applications Laboratory (EPHMEE) et du programme d'études supérieures “Sonic Arts and Technologies ”. Il est membre fondateur de l'association Hellenic Electroacoustic Music Composers Association (HELMCA) et de la Hellenic Society for Acoustic Ecology (HSAE). [amnies@gmail.com].
Quelques mots à propos de : Theodoros Lotis
Theodoros Lotis enseigne la composition et l'analyse électroacoustique au Goldsmiths College-Université de Londres, à la Technological and Educational Institute of Crete, à l’Aristotle University of Thessaloniki, et dans diverses autres universités européennes et américaines en tant que compositeur invité. Il est professeur associé à la Ionian University de Corfou, où il enseigne les arts aonores, la composition électroacoustique, l’histoire et l’esthétique de la musique électroacoustique, l’informatique musicale, la programmation musicale. Il est membre fondateur de l'association Hellenic Electroacoustic Music Composers Association (HELMCA) et de la Hellenic Society for Acoustic Ecology. Sa musique a été publiée chez Empreintes Digitales (www.electrocd.com). [https://www.theodoroslotis.com].

Actualités
Numéros
La revue
Compte-rendus
Index
Partenaires
![]()




Syndication
Contact | Plan du site | Portail des revues de la MSH Paris Nord | Edité par Lodel | Accès réservé | ISSN 2261-7922
Revue hébergée et soutenue par la Maison des Sciences de l'Homme Paris Nord
Copyright :
Les numéros 1 à 14 de la revue Filigrane sont parus sous forme de publication papier aux éditions Delatour France. Ils sont disponibles sur le site de l'éditeur Delatour.
Les numéros postérieurs au numéro 14 de la revue Filigrane sont mis à disposition selon les termes de la Licence Creative Commons Attribution
Pas d'utilisation commerciale, pas de modification, 3.0 France.
